





沟通伺服电动机中的滤波器介绍
 时间: 2024-01-27
时间: 2024-01-27  作者:
作者: 出现在市场上。随技能完善,价格下降,操控功能的进步,操作调试日趋简略,以及系列化、模块化继续不断的开展,用它替代其他类型的
直接驱动电动机(d-d motor,dynaserv)因其不需要减速器而在某些特定场合得到遍及的运用,相当于咱们称作的力矩电动机,只不过前者是用新式的沟通电动机原理,是数字操控式的。现用横河公司(yokogawa)的智能驱动器drvgN例介绍它的滤波器。该驱动器为较新式的类型,能够较全面的归纳其他类型的用法。
低频振动,频率几赫兹,振动起伏几度到几十度,有时超出操控区。由方位操控频率带宽和速度操控频率带宽失衡引起,如速度操控频率带宽小于方位操控频率带宽3倍。也能够是主动调整时惯量力矩值不合适,如大于1.5倍时。能重复履行主动调整操作并查看惯量值,其差错不能大于20%。或下降#0参数设置值(伺服刚度设置参数)。
振动现象类似于调整振动。当履行低速运转指令时,重复一走一停,是静摩擦力大于低速时的动摩擦力导致。原因是方位积分约束值太大,方位误差太大从而使操控办理体系不安稳。办法是调整“积分约束值”或添加体系刚度。
振动频率为几十到200hz,振动起伏不低于几十度。原因是速度输出信号相位落后于速度输入信号相位180,由操控理论可知这时体系无安稳裕量。当各种滤波器运用相同的频率或速度操控带宽和滤波器频率带宽相一起都可引起这种振动。处理办法为下降#1参数设置值(伺服刚度设置参数)。
振动频率为几十到2khz,振动起伏顶多几度,依结构而定。振幅小而频率高,常可听到震颤噪音,体系刚度小易引起这个现象。引起原因是负载的机械谐振扰动进入速度操控环,大都状况下有几个谐振频率。所以规划体系时机械谐振频率应尽量高,至少要高于体系操控带宽5倍以上,结构规划时留意刚性规划,防止细长杆结构。可调整滤波器按捺频率谐振点增益来处理。
为一阶推迟滤波器,因为它可调理带宽的频率,添加阻尼,在削减相移上优于速度反应滤波器。
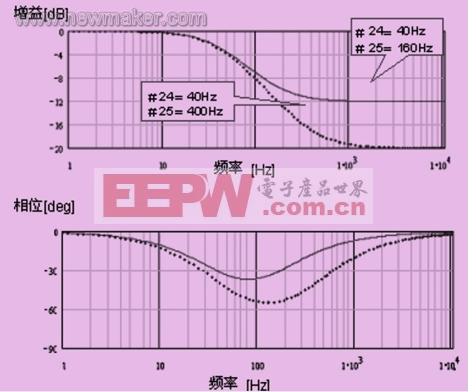
由图1的bode图可看出它比速度反应滤波器多一个一阶微分环节用于补偿相位丢失,参数#24对应积分常数,参数#25对应微分常数。而且最大增益衰减点频率可设置,使相位滞后减到最小。别的,相对于陷波滤波器,它对按捺频率规模宽的谐振作用好,因其起伏按捺值小,对峰值高频带窄的谐振不合适。
陷波滤波器又称为带阻滤波器,可对恣意频率信号有效地阻断,乃至可使谐振点的增益降到零。当谐振峰值高而频率带宽窄时适用。经过改动品质因数(q值)使衰减特性改变急剧或陡峭。频率设置规模从50~1500hz,q值设置规模从0.5~2.5(默认值1.5)。图2示出了陷波滤波器设置图。


